近日,土木工程学院冯晓东副教授团队与日本科研人员合作在机器人领域顶级期刊《Soft Robotics》在线刊登题为“Trajectory Planning on Rolling Locomotion of Spherical Movable Tensegrity Robots with Multi-Gait Patterns”的最新研究成果。经过大量数据分析及模拟测试,该研究首次实现了多步态球形可动张拉整体机器人在滚动运动时的轨迹规划,为此类软体机器人在复杂环境和场景中的应用提供夯实的理论依据。

图1研究成果发表于国际顶级学术期刊《Soft Robotics》
相对于传统刚性机器人结构复杂、运动灵活性低、环境交互性差等缺点,柔性张拉整体机器人作为软体机器人的一种典型代表,具有良好的柔顺性、运动灵活性、环境适应性和交互能力,在航空航天、探勘、医疗等领域越来越受到重视。球形可动张拉整体机器人,凭借其重量轻、弹性强的内在特点,在探索不可预测地形和极端环境方面表现出巨大潜力。球形张拉整体的几何形状决定了其适合滚动运动,同时其柔性特征保证了系统能够对不断变化的需求做出反应以穿越未知地形,并在遭受严重损坏后仍能执行任务。

图2柔性张拉整体机器人的应用
现有的球形张拉整体机器人几乎均为单步态运动模式,从而导致其在对未知复杂环境进行探索时存在步态单一、路径空间盲区大、行进效率低等缺陷。为此,研究团队开发了三个具有多步态特征的12杆张拉整体机器人原型并对其各自的独立(或进化)步态模式进行了动态模拟和验证,并结合步态驱动量、路径盲区大小和行进跨度等参数指标评估三种12杆张拉整体机器人与经典的6杆张拉整体机器人在运动学步态模式的可行性和适用性,从而筛选出最优者。

图3 三种12杆球形张拉整体机器人的基本独立步态及进化步态分类及模拟
进一步地,研究团队制定了一套轨迹转向控制策略并将其嵌入至改进的快速搜索随机树(MRRT)算法用以生成最佳轨迹路线,提出了两个适用于多步态张拉整体机器人的重要引导指标,以搜索与特定需求相符的最佳步态模式,从而实现了基于目标优先级的机器人轨迹路线自适应调整。
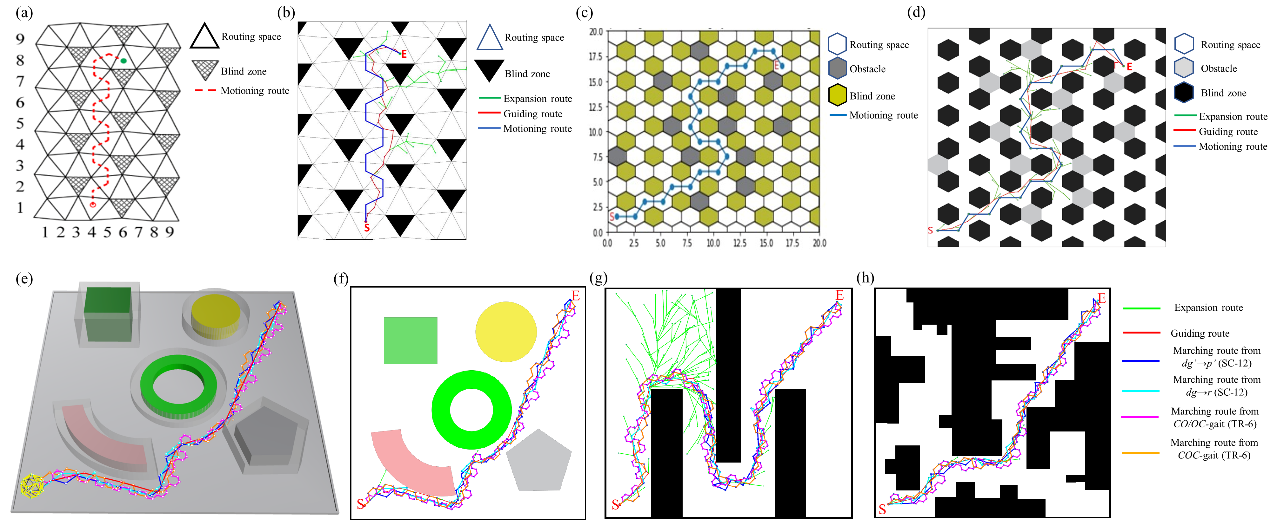
图4 三种12杆球形张拉整体机器人在探索三个场景时形成的最佳轨迹
威尼斯官网土木工程学院、人工智能研究院冯晓东副教授为论文第一作者,日本京都大学张景耀教授为通讯作者。土木工程学院研究生徐佶、日本京都大学Ohsaki Makoto教授、88038威尼斯赵阳教授、浙江大学罗尧治教授、东南大学陈耀教授、浙江大学许贤教授等科研人员共同参与了此项工作。该研究得到了国家自然科学基金(Grant No. 51908356),国家留学基金委(Grant No. 202008330250)等相关项目资助。
据悉,《Soft Robotics》是机器人领域的顶级期刊,具有广泛的国际影响力。该期刊鼓励多学科交叉,涵盖机械、力学、材料、控制、化学、生命科学等多个领域。
论文链接:https://www.liebertpub.com/doi/full/10.1089/soro.2023.0103?#core-collateral-purchase-access




 浙公网安备 33030402000759号
浙公网安备 33030402000759号
 教职工
教职工

 学生
学生
 考生
考生
 VPN
VPN
 办事大厅
办事大厅 电子邮箱
电子邮箱 新闻网
新闻网 English
English 返回旧版
返回旧版

